Cloud Programming World Cup 第6回 学生クラウドプログラミングワールドカップ(主催:CPWC実行委員会)のエントリー総数は17チームとなり、6チームがノミネート。2018年11月15日、品川インターシティホールに於いて、最終公開審査を経てワールドカップ賞及び4つの審査員特別賞が決定いたしました。
 |
 |
|
ワールドカップ賞 |
エントリーNo.
32 |
| 作品タイトル : Autonomous Truck Loader using OpenCV |
| チーム名 : Tech.Divas 所属 : タキシラ工科技術大学 参加国 : パキスタン |
|
 データ概要
データ概要
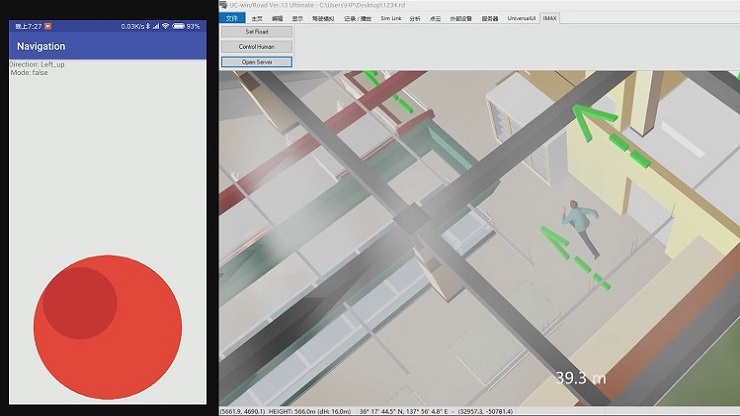
この作品は2つのモジュールで構成されている。
- pythonを使用して開発した独立アプリケーションで、UDPプロトコルでUC-win/Roadと通信するコンピュータビジョンモジュール。
- UDPサーバーとして機能し、上記モジュールからの受け取ったコマンドに応じてシミュレーションを更新するDelphiで開発したプラグイン。
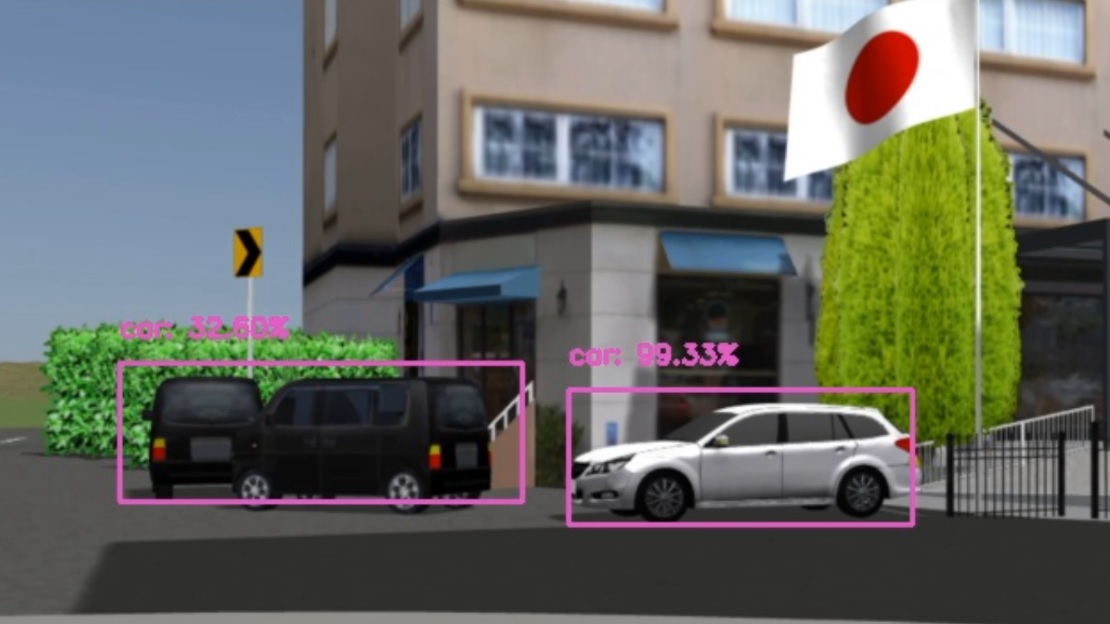
コンピュータビジョンモジュールはSDKプラグインを使用してUDP上でトラックローダーと統合されている。トラックには物体・車線の検出用にフロントカメラが取り付けられていて、カメラは使用前にOpenCVライブラリを用いてキャリブレーションされる。システムが物体を検出し、ゴミや雪を持ち上げるたびにメッセージが表示される。また、このシステムは歩行者や他車を検出して衝突回避にも使用できる。 |
|
The project Autonomous Truck Loader using OpenCV comprises of two modules.
- A computer vision module developed using python and running as independent
application. This module communicates with UC-win/Road through UDP protocol.
- A plugin developed in Delphi which acts as a UDP server and receives commands
from the python module and updates the simulation accordingly.
The computer vision module is integrated with loader truck on UDP using
SDK Plugin. A front camera is mounted on simulated truck for object/ lane
detection. The truck mounted camera is calibrated before use, using OpenCV
libraries for visual display and Road Lane.The system displays a message
whenever it detects an object, reaches out, and collects garbage/lifts
snow. Additionally, the system is also capable of detecting pedestrians
and other vehicles to avoid any type of collision. |
作品を鑑賞
|
|